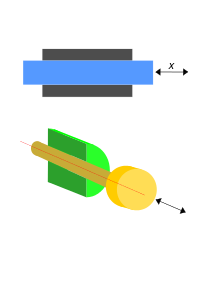
A prismatic joint provides a linear sliding movement between two bodies, and is often called a slider, as in the slider-crank linkage. Aprismatic joint can be formed with a polygonal cross-section to resist rotation.
 https://en.wikipedia.org/wiki/Prismatic_joint
https://en.wikipedia.org/wiki/Prismatic_joint
http://www.robot-welding.com/robots.htm
https://www.tu-chemnitz.de/phil/english/sections/linguist/independent/kursmaterialien/TechComm/acchtml/class_ex.html
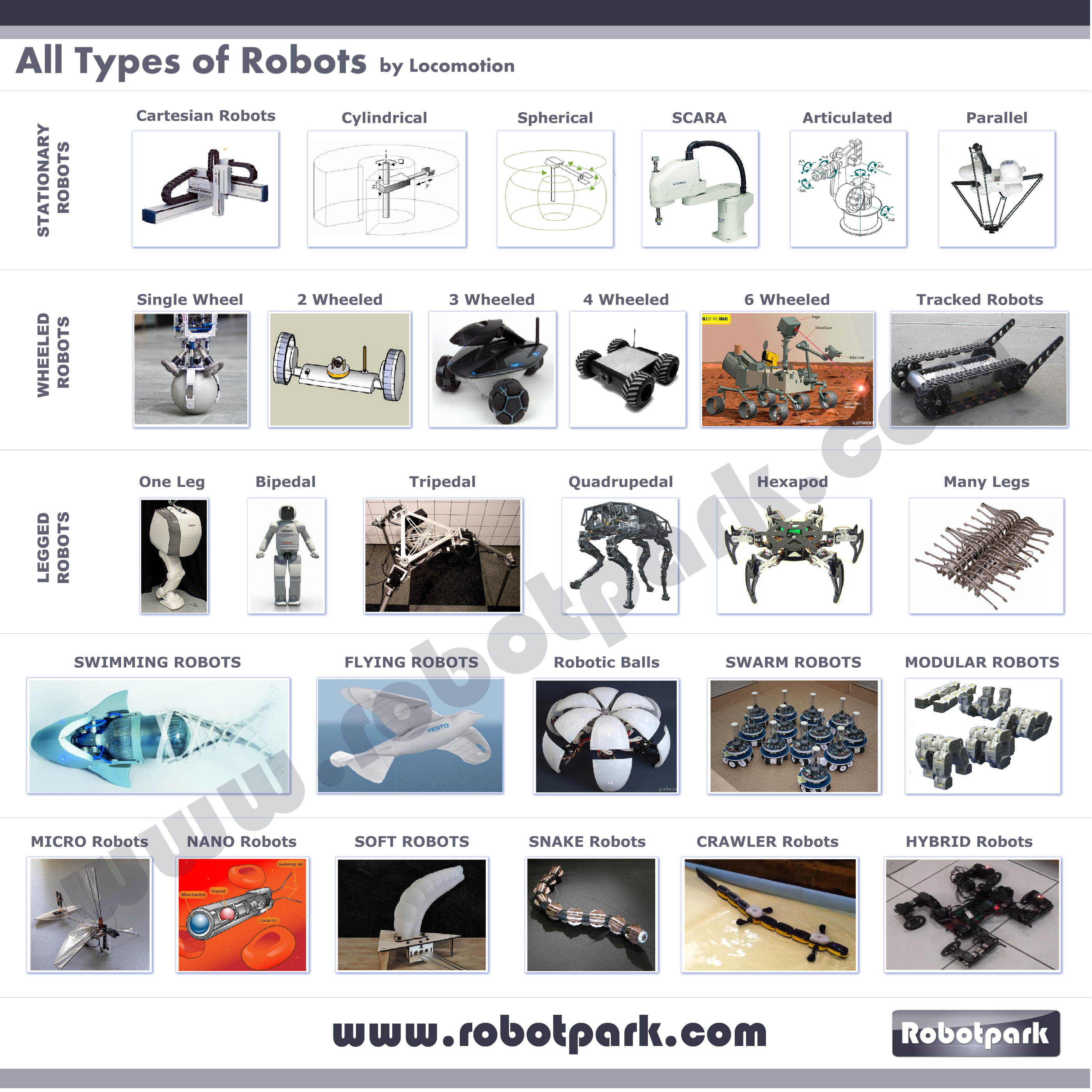
http://www.robotpark.com/All-Types-Of-Robots

https://walterfarah.wordpress.com/2013/06/04/robotica-industrial-una-oferta-nada-sencilla/
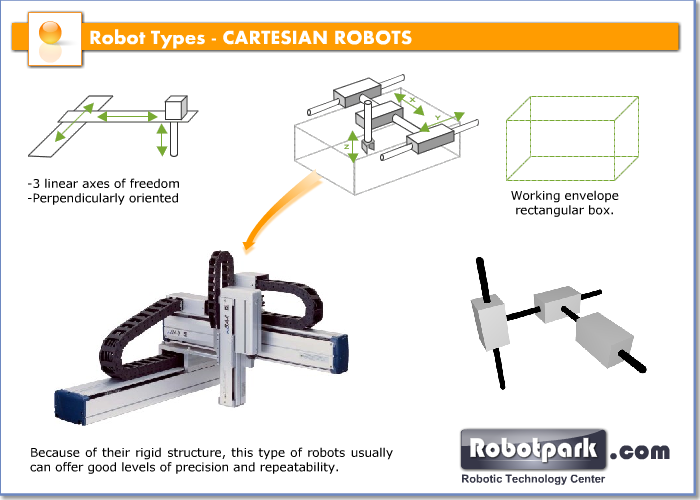
Cartesian Robots
http://www.robotpark.com/academy/all-types-of-robots/stationary-robots/robotic-arms-articulated-robots/
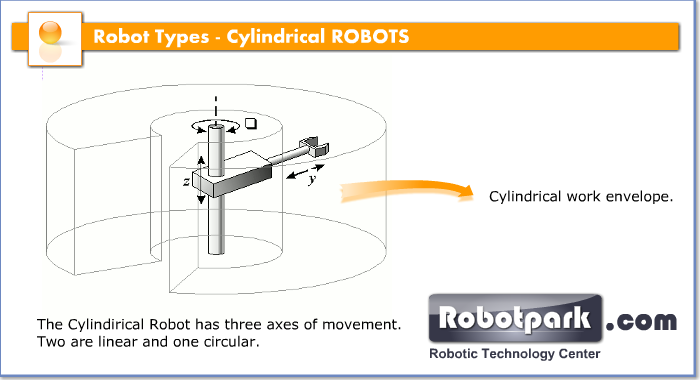
Cylindrical Robots
http://www.robotpark.com/academy/all-types-of-robots/stationary-robots/cylindirical-robots/
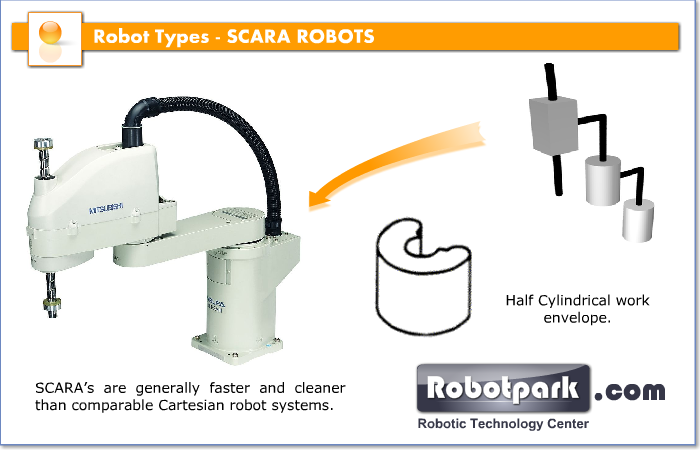
SCARA Robots
http://www.robotpark.com/academy/all-types-of-robots/stationary-robots/scara-robots/
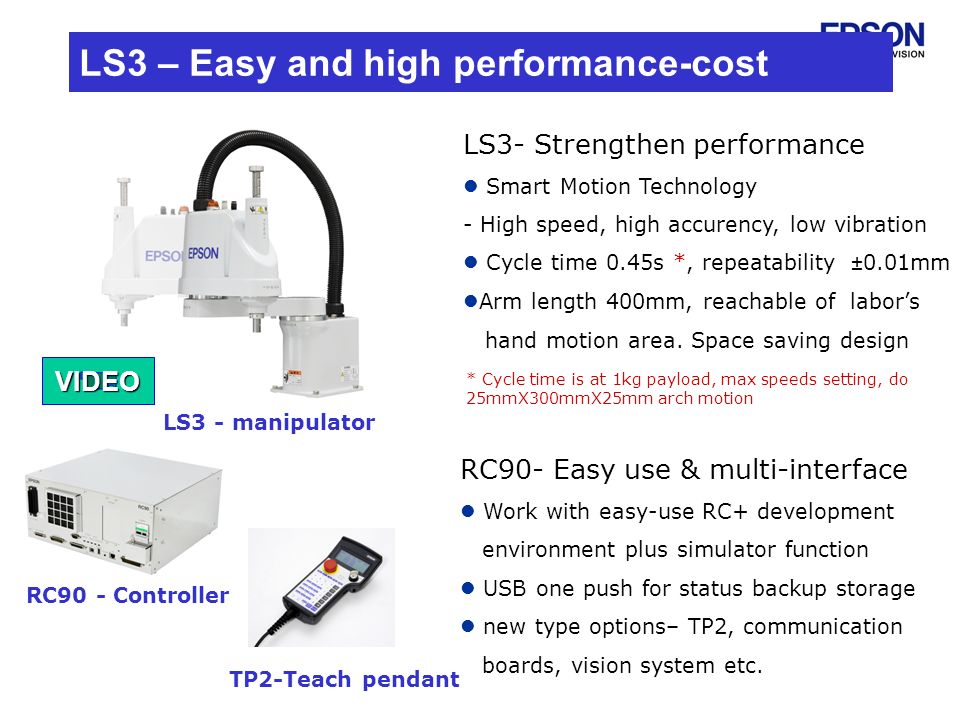
Epson LS3
[src:http://images.slideplayer.com/22/6404114/slides/slide_25.jpg]
Spherical Robot
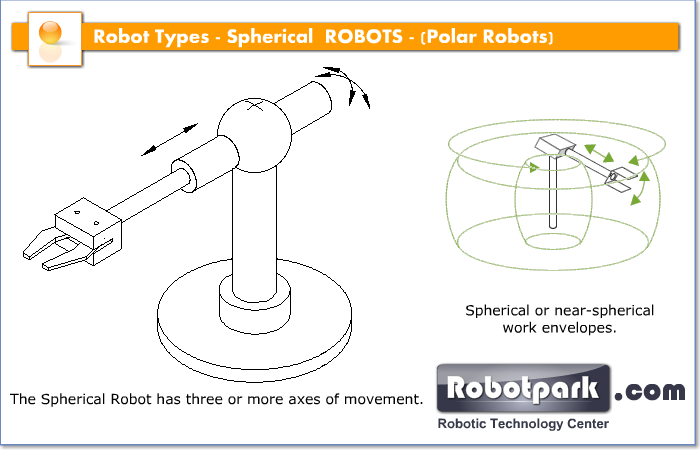
http://www.robotpark.com/academy/all-types-of-robots/stationary-robots/spherical-robots/
Articulated Robots
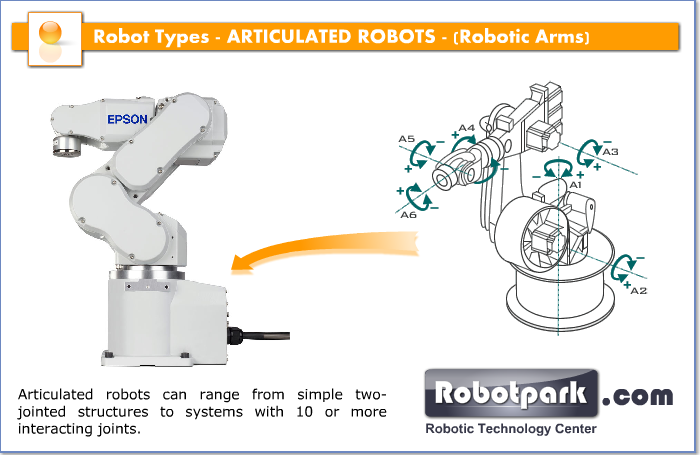
http://www.robotpark.com/academy/all-types-of-robots/stationary-robots/robotic-arms-articulated-robots/
FANUC LR Mate
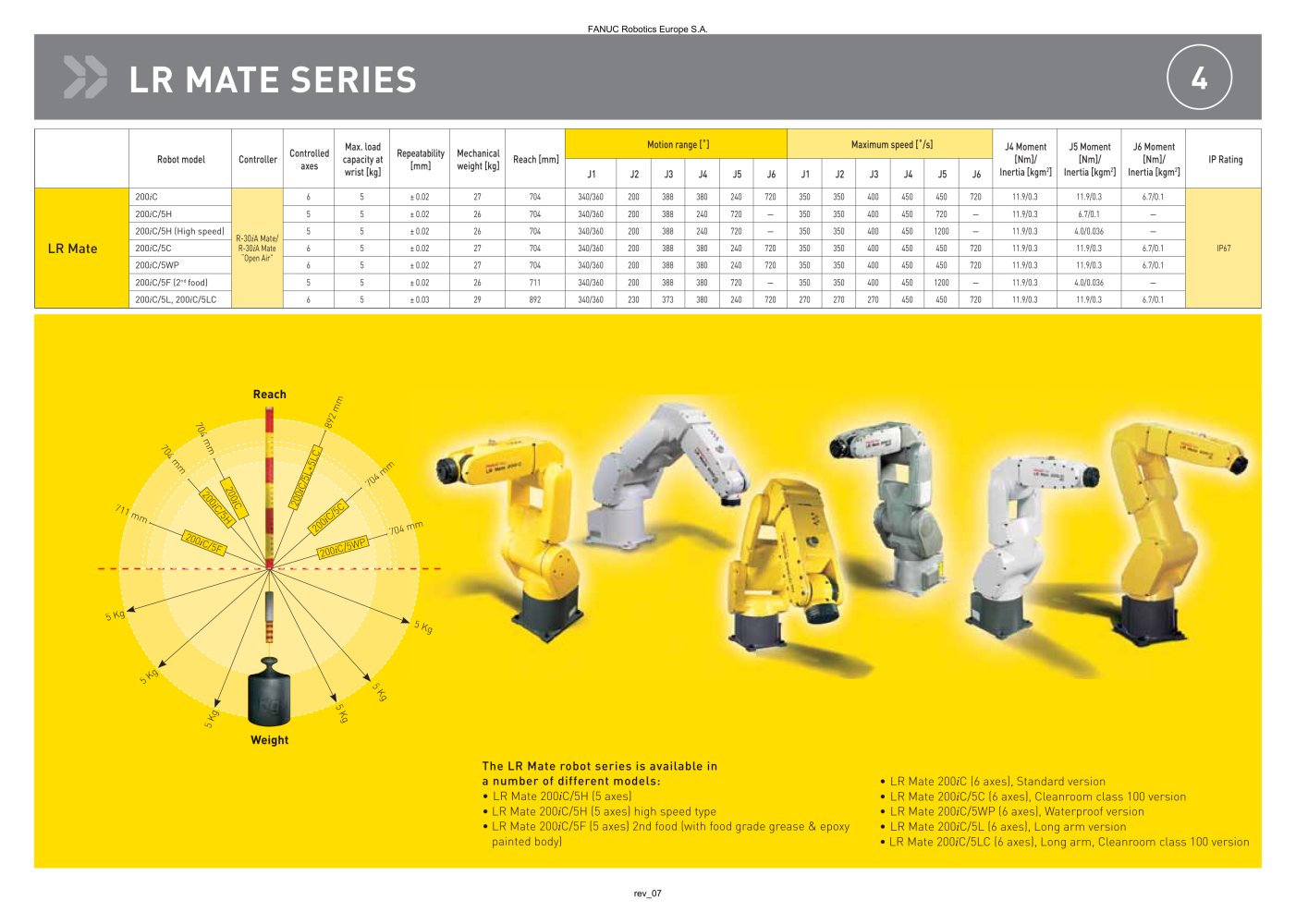
[SRC: http://img.directindustry.com/pdf/repository_di/32007/lr-mate-157867_1b.jpg]
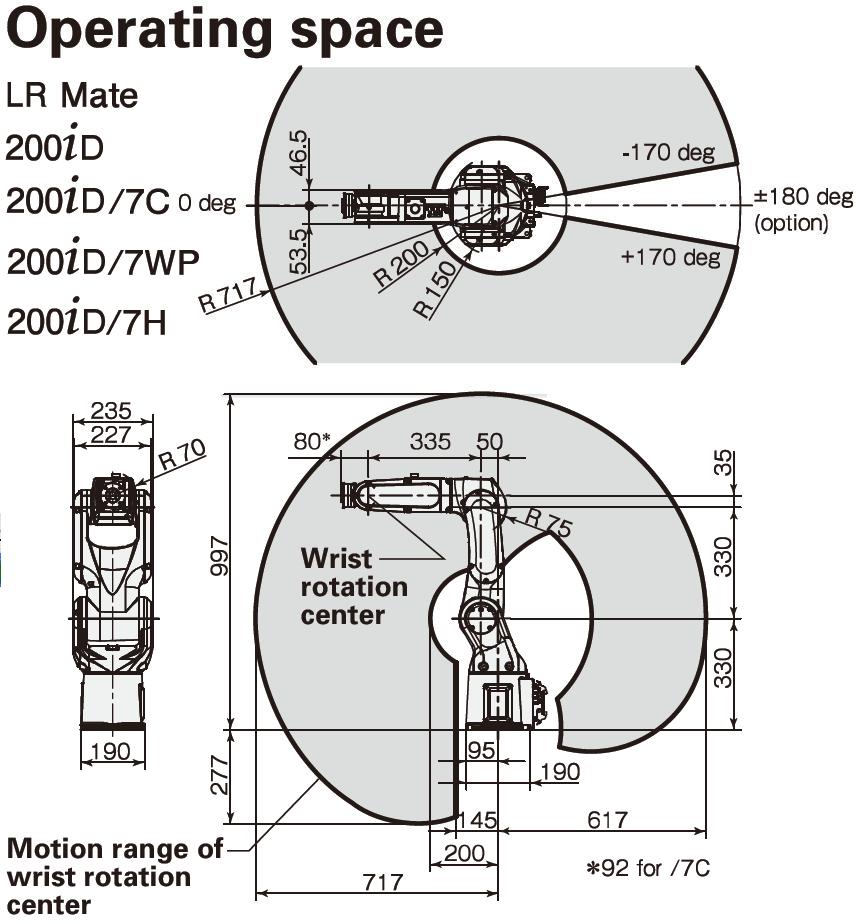
[SRC: http://www.americanrobotsales.com/images/opspacelrmate200id.JPG]
Parallel Robots (aka Delta Robots)
https://en.wikipedia.org/wiki/Delta_robot
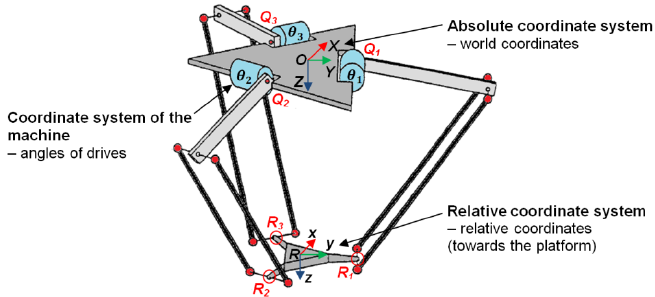
https://www.researchgate.net/figure/226447208_fig1_Fig-1-Kinematic-scheme-of-DELTA-robot-5
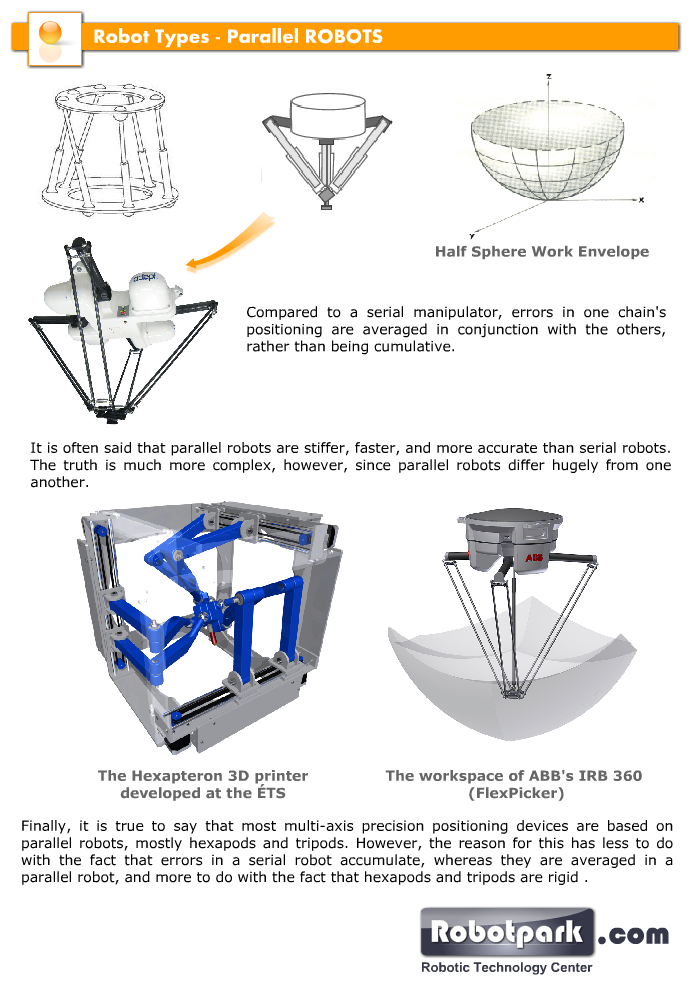
http://www.robotpark.com/academy/all-types-of-robots/stationary-robots/parallel-robots/
FANUC M-1

[SRC: http://www.fanuc.eu/~/media/corporate/products/robots/m1/generic/600x400/int-ro-ia-m1-assembl-1.jpg?w=400]
FANUC M-1iA Envelope
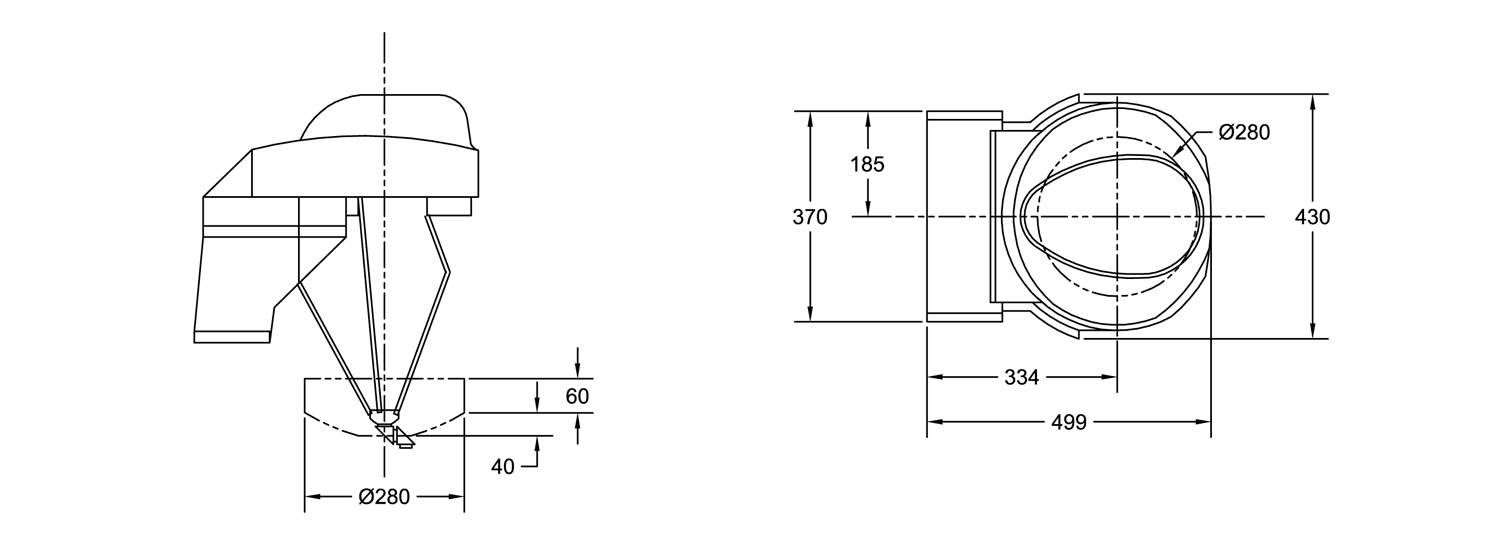
[SRC: https://www.robots.com/images/pdf_images/dwgs/m-1ia_envelope.jpg]


{kind=link}